Apesar de alguns problemas já citados aqui no blog no decorrer do trabalho todos foram solucionados, e ainda que com algumas dificuldades todos os objetivos foram alcançados, o grupo trabalhou junto desde o começo, o que certamente contribuiu para o êxito do trabalho, com cada um fazendo a sua parte. O trabalho por si foi bem interessante e fez os integrantes relembrarem conceitos e formulas dos anos anteriores que vai ajudar no vestibular. O grupo conseguiu construir o robô dentro da data proposta pelo professor, conseguiu completar a prova mínima, que era fazer um 8 em menos de 1 minuto e vai participar da competição.
segunda-feira, 31 de outubro de 2016
domingo, 30 de outubro de 2016
Teste do robo
Foi realizado dia 27/10/16 outro teste da prova minima. E o nosso grupo conseguiu melhorar o tempo para 13,09s e depois para 10,17s
sábado, 29 de outubro de 2016
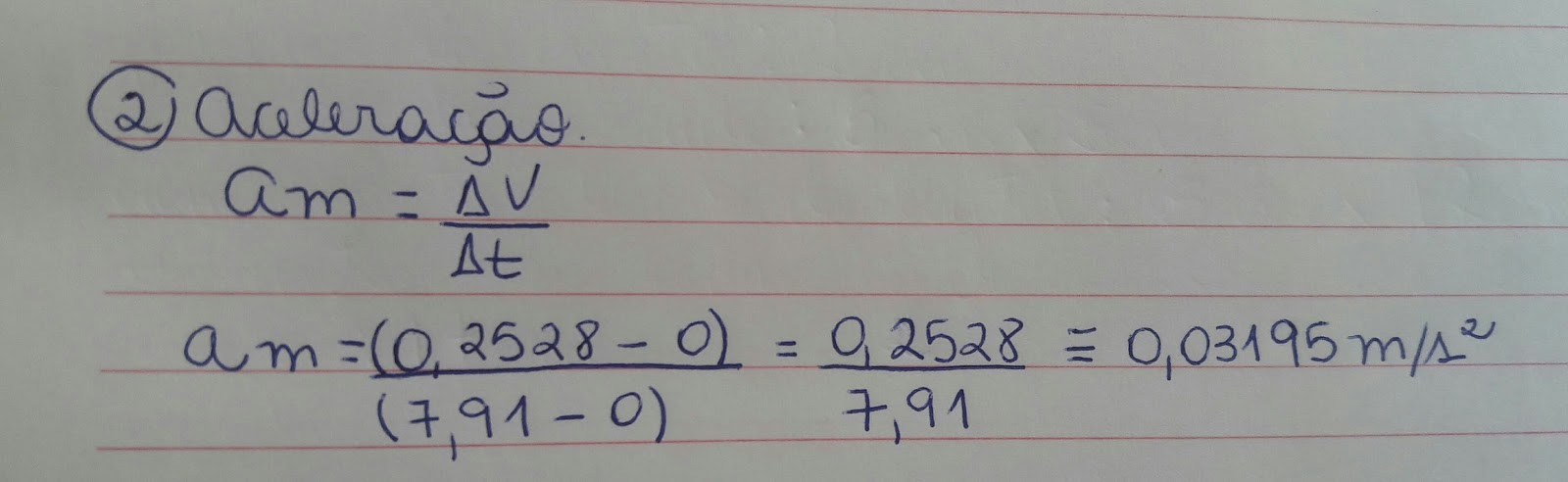
Grandezas




referencia:
(7) curso de eletronica - acessado em 29/10/2016
(8) Corrente elétrica - Toda matéria - acessado em 29/10/2016
(9) Só Fisica - Fórmulas de Cinematica - acessado em 29/10/2016
(10) Aceleração da gravidade - Wikipédia acessado em 29/10/2016
(11) Só fisica - quantidade de movimento - acessado em 29/10/2016
(12) Tabela de fios - acessado dia 01/11/16
domingo, 16 de outubro de 2016
Teste do robô gladiador realizado sexta feira dia 14/10
Dia 14/10, sexta-feira, foi realizado em sala de aula o segundo teste com o robô gladiador. Neste o grupo atingiu um dos objetivos do trabalho que era fazer o 8 em até 1minuto. O grupo conseguiu fazer o 8 no tempo de 21,03 segundos.
O resultado do teste nesse dia ficouo seguinte:
Grupo 1 - 26,59 seg
Grupo 2 - 21,03 seg
Grupo 3 - -----
Grupo 4 - 28,56 seg
Grupo 5 - -----
Grupo 6 - -----
Grupo 8 - 9,78 seg
Grupo 9 - 8,31 seg
Grupo 10 - ---
Obs: os grupos que estão sem o tempo ainda não conseguiram realizar o 8
O resultado do teste nesse dia ficouo seguinte:
Grupo 1 - 26,59 seg
Grupo 2 - 21,03 seg
Grupo 3 - -----
Grupo 4 - 28,56 seg
Grupo 5 - -----
Grupo 6 - -----
Grupo 8 - 9,78 seg
Grupo 9 - 8,31 seg
Grupo 10 - ---
Obs: os grupos que estão sem o tempo ainda não conseguiram realizar o 8
domingo, 2 de outubro de 2016
Testando o robô pela 1ªvez:


Problemas e soluções encontrados:
|
Problemas
|
Soluções
|
|
No sistema elétrico, quando fomos prender o fio verde no parafuso ele
ficava soltando porque o parafuso estava frouxo no furo que encaixava.
|
Apertamos o furo com alicate para que quando o parafuso entrasse no
buraco ele ficasse mais firme e assim conseguimos prender o fio bem justo ao
parafuso.
|
|
O motor do lado direito, correspondente a cor dos fios preto/vermelho,
estava girando do lado ao contrario do outro motor.
|
Invertemos os fios preto/vermelho
que estava ligado ao fio de 3 metros para que as rodas girassem na
mesma direção.
|
|
O motor direito não estava encostando na roda.
|
Alongamos a parte giratória do motor com um bico de seringa
  |
Dimensões do robo
- Chassi: 12x27,5 cm
- Do chão ao chassi: 4,5 cm
- Diâmetro da roda dianteira: 3 cm
- Diâmetro das rodas traseiras: 12 cm
- Do centro da roda dianteira ate o centro da roda traseira: 17 cm
- Altura do robô na parte dianteira: 9,5 cm
- Altura do robô na parte traseira: 14,5 cm
- Escudo na parte dianteira: 12x5 cm
- Escudo dos lados: 5x5 cm (para cada lado)
- Suspenção: 14x12 cm
- Parte da suspenção que ficou colada no chassi: 3x12 cm
- Altura da suspenção ate o chassi na parte traseira do robô: 8 cm
- Da parte traseira do robô ate o local da colagem da suspensão: 12 cm
- Do centro do eixo ate a parte traseira: 6 cm
- Do rodizio giratório ate a parte dianteira: 2,5 cm
- Base do rodizio giratório: 3x4,5 cm
- Largura do motor: 2 cm
- Diâmetro do motor: 2,5 cm
- Circunferência do elástico: 22 cm
- Os pregos que foram usados para segurar o elástico foram colocados a 1,5 cm tanto da traseira do chassi quanto da traseira da suspensão, e estão bem no centro, ou seja, com 6 cm para cada lado.
- Tampa da caixa do controle: 12x11,5 cm
- Altura do controle sem os botões: 4,5 cm
- Altura do controle com os botões: 7 cm
Referencias:
(4) Manual de construção do carrinho que veio junto com o kit, criado por Fernando Bettoni.
Fotos do robô finalizado:

Roda esquerda com o motor
Roda direita com o motor. OBS: Nessa roda colocamos a ponta da seringa pra aumentar a área do motor e para que assim encoste na roda.

Parte de trás

Lateral

Cima
Acoplamento do sistema elerico no robô
Novamente seguimos o tutorial do kit adquirido pelo grupo e abaixo seguem as fotos dessa etapa:






Reunião: 2/10 casa da Julia
No final do dia, a Maria Julia, Luiza, Maria Rita foram na casa da Julia Hardman para conseguirem colar os motores na base do carrinho e assim fazer com que o carrinho ande.
Construção parte elétrica do controle do robô realizada dia 02/10
A parte elétrica do robô foi montada de acordo com o tutorial do Fernando Bettoni. A dificuldade encontrada aqui foi para ligar o fio verde no parafuso, pois este estava dificill para apertar. Entretanto, a solução encontrada foi apertar com um alicate o local em que o parafuso entra. Assim, o fio ficou bem enrolado no parafuso que ficou bem preso.


Nesta imagem os fios estão jumpeados em X formando os seguintes pares: vermelho/preto e verde/amarelo





Referencia:
(4) Manual de construção do carrinho que veio junto com o kit, criado por Fernando Bettoni.
Reunião: Dia 2/10
Hoje, as alunas Luiza e Maria Julia foram na casa desta ultima, depois do almoço para a montagem do sistema elétrico.
Assinar:
Comentários (Atom)