Apesar de alguns problemas já citados aqui no blog no decorrer do trabalho todos foram solucionados, e ainda que com algumas dificuldades todos os objetivos foram alcançados, o grupo trabalhou junto desde o começo, o que certamente contribuiu para o êxito do trabalho, com cada um fazendo a sua parte. O trabalho por si foi bem interessante e fez os integrantes relembrarem conceitos e formulas dos anos anteriores que vai ajudar no vestibular. O grupo conseguiu construir o robô dentro da data proposta pelo professor, conseguiu completar a prova mínima, que era fazer um 8 em menos de 1 minuto e vai participar da competição.
segunda-feira, 31 de outubro de 2016
domingo, 30 de outubro de 2016
Teste do robo
Foi realizado dia 27/10/16 outro teste da prova minima. E o nosso grupo conseguiu melhorar o tempo para 13,09s e depois para 10,17s
sábado, 29 de outubro de 2016
Grandezas




referencia:
(7) curso de eletronica - acessado em 29/10/2016
(8) Corrente elétrica - Toda matéria - acessado em 29/10/2016
(9) Só Fisica - Fórmulas de Cinematica - acessado em 29/10/2016
(10) Aceleração da gravidade - Wikipédia acessado em 29/10/2016
(11) Só fisica - quantidade de movimento - acessado em 29/10/2016
(12) Tabela de fios - acessado dia 01/11/16
domingo, 16 de outubro de 2016
Teste do robô gladiador realizado sexta feira dia 14/10
Dia 14/10, sexta-feira, foi realizado em sala de aula o segundo teste com o robô gladiador. Neste o grupo atingiu um dos objetivos do trabalho que era fazer o 8 em até 1minuto. O grupo conseguiu fazer o 8 no tempo de 21,03 segundos.
O resultado do teste nesse dia ficouo seguinte:
Grupo 1 - 26,59 seg
Grupo 2 - 21,03 seg
Grupo 3 - -----
Grupo 4 - 28,56 seg
Grupo 5 - -----
Grupo 6 - -----
Grupo 8 - 9,78 seg
Grupo 9 - 8,31 seg
Grupo 10 - ---
Obs: os grupos que estão sem o tempo ainda não conseguiram realizar o 8
O resultado do teste nesse dia ficouo seguinte:
Grupo 1 - 26,59 seg
Grupo 2 - 21,03 seg
Grupo 3 - -----
Grupo 4 - 28,56 seg
Grupo 5 - -----
Grupo 6 - -----
Grupo 8 - 9,78 seg
Grupo 9 - 8,31 seg
Grupo 10 - ---
Obs: os grupos que estão sem o tempo ainda não conseguiram realizar o 8
domingo, 2 de outubro de 2016
Testando o robô pela 1ªvez:


Problemas e soluções encontrados:
|
Problemas
|
Soluções
|
|
No sistema elétrico, quando fomos prender o fio verde no parafuso ele
ficava soltando porque o parafuso estava frouxo no furo que encaixava.
|
Apertamos o furo com alicate para que quando o parafuso entrasse no
buraco ele ficasse mais firme e assim conseguimos prender o fio bem justo ao
parafuso.
|
|
O motor do lado direito, correspondente a cor dos fios preto/vermelho,
estava girando do lado ao contrario do outro motor.
|
Invertemos os fios preto/vermelho
que estava ligado ao fio de 3 metros para que as rodas girassem na
mesma direção.
|
|
O motor direito não estava encostando na roda.
|
Alongamos a parte giratória do motor com um bico de seringa
  |
Dimensões do robo
- Chassi: 12x27,5 cm
- Do chão ao chassi: 4,5 cm
- Diâmetro da roda dianteira: 3 cm
- Diâmetro das rodas traseiras: 12 cm
- Do centro da roda dianteira ate o centro da roda traseira: 17 cm
- Altura do robô na parte dianteira: 9,5 cm
- Altura do robô na parte traseira: 14,5 cm
- Escudo na parte dianteira: 12x5 cm
- Escudo dos lados: 5x5 cm (para cada lado)
- Suspenção: 14x12 cm
- Parte da suspenção que ficou colada no chassi: 3x12 cm
- Altura da suspenção ate o chassi na parte traseira do robô: 8 cm
- Da parte traseira do robô ate o local da colagem da suspensão: 12 cm
- Do centro do eixo ate a parte traseira: 6 cm
- Do rodizio giratório ate a parte dianteira: 2,5 cm
- Base do rodizio giratório: 3x4,5 cm
- Largura do motor: 2 cm
- Diâmetro do motor: 2,5 cm
- Circunferência do elástico: 22 cm
- Os pregos que foram usados para segurar o elástico foram colocados a 1,5 cm tanto da traseira do chassi quanto da traseira da suspensão, e estão bem no centro, ou seja, com 6 cm para cada lado.
- Tampa da caixa do controle: 12x11,5 cm
- Altura do controle sem os botões: 4,5 cm
- Altura do controle com os botões: 7 cm
Referencias:
(4) Manual de construção do carrinho que veio junto com o kit, criado por Fernando Bettoni.
Fotos do robô finalizado:

Roda esquerda com o motor
Roda direita com o motor. OBS: Nessa roda colocamos a ponta da seringa pra aumentar a área do motor e para que assim encoste na roda.

Parte de trás

Lateral

Cima
Acoplamento do sistema elerico no robô
Novamente seguimos o tutorial do kit adquirido pelo grupo e abaixo seguem as fotos dessa etapa:






Reunião: 2/10 casa da Julia
No final do dia, a Maria Julia, Luiza, Maria Rita foram na casa da Julia Hardman para conseguirem colar os motores na base do carrinho e assim fazer com que o carrinho ande.
Construção parte elétrica do controle do robô realizada dia 02/10
A parte elétrica do robô foi montada de acordo com o tutorial do Fernando Bettoni. A dificuldade encontrada aqui foi para ligar o fio verde no parafuso, pois este estava dificill para apertar. Entretanto, a solução encontrada foi apertar com um alicate o local em que o parafuso entra. Assim, o fio ficou bem enrolado no parafuso que ficou bem preso.


Nesta imagem os fios estão jumpeados em X formando os seguintes pares: vermelho/preto e verde/amarelo





Referencia:
(4) Manual de construção do carrinho que veio junto com o kit, criado por Fernando Bettoni.
Reunião: Dia 2/10
Hoje, as alunas Luiza e Maria Julia foram na casa desta ultima, depois do almoço para a montagem do sistema elétrico.
quinta-feira, 29 de setembro de 2016
Montagem do carrinho realizada no dia 28/09
Abaixo segue fotos da construção da base do carrinho. O grupo comprou o kit e seguiu o tutorial do de construção da base pata montar essa parte do robô do grupo.


















Referencia:
(4) Manual de construção do carrinho que veio junto com o kit, criado por Fernando Betonni.
quarta-feira, 28 de setembro de 2016
Reunião: Dia 28/09
Hoje, as alunas Maria Julia, Julia Hardman e Maria Rita se reuniram após as seis horas, na casa da Julia, para a construção da base do carrinho.
Neste dia, as alunas Maria Julia e Julia ficaram encarregadas de montar o carrinho e a Maria Rita anotar e tirar as fotos para depois ser postado no blog.
Neste dia, as alunas Maria Julia e Julia ficaram encarregadas de montar o carrinho e a Maria Rita anotar e tirar as fotos para depois ser postado no blog.
Objetivo da iniciação tecnologica do 3ºtrimetre
1- Construir um robô gladiador;
2- Conseguir fazer a prova minima: o robô deve fazer um "8" no tempo de 1min
3- Utilizar grandezas aprendidas em física e aplica-las no trabalho
2- Conseguir fazer a prova minima: o robô deve fazer um "8" no tempo de 1min
3- Utilizar grandezas aprendidas em física e aplica-las no trabalho
terça-feira, 27 de setembro de 2016
Levantamento dos valores gastos pelo robo gladiador
No dia 23 de setembro de 2016, cada membro do grupo levou R$12,00 para pagar o kit que no total deu R$60,00. Pagamos o kit na sexta-feira na tesouraria do colégio Idesa e pegamos o kit na segunda-feira, dia 26/08, na web, com Fernando Bettoni.
domingo, 28 de agosto de 2016
Pesquisa sobre robôs
Definição de robô:
•Um robô é um dispositivo, ou grupo de dispositivos, eletromecânicos ou biomecânicos capazes de realizar trabalhos de maneira autônoma ou pré-programa (1);
•De acordo com o dicionário (2):
nome masculino
1.mecanismo automático, por vezes com a configuração de um ser humano, capaz de fazer movimentos e executar certos trabalhos em substituição do homem
2.figurado pessoa que cumpre ordens automaticamente
Quando foi construído o primeiro robô?
O primeiro projeto documentado de um autômato humanoide foi feito por Leonardo da Vinci por volta do ano de 1495. As notas de Da Vinci, redescobertas nos anos 50, continham desenhos detalhados de umcavaleiro mecânico que era aparentemente capaz de sentar-se, mexer seus braços, mover sua cabeça e o maxilar. O projeto foi baseado em sua pesquisa anatômica documentada no Homem Vitruviano. Não é conhecido se ele tentou ou não construir o mecanismo. (1)
O primeiro autômato funcional foi criado em1738 por Jacques de Vaucanson, que fez um androide que tocava flauta, assim como um pato mecânico que comia e defecava. A história "The Sandman" de E.T.A. Hoffmanntraz uma mulher mecânica semelhante a uma boneca, e "Steam Man of the Prairies", de Edward S. Ellis (1865) expressa a fascinação americana com a industrialização. Uma onda de histórias sobre autômatos humanoides culminou com a obra "Electric Man" (Homem Elétrico), de Luis Senarens (1885). (1)
Uma vez que a tecnologia avançou a ponto de as pessoas preverem o uso das criaturas mecânicas como força de trabalho, as respostas literárias ao conceito dos autômatos (robôs) refletiu o medo dos seres humanos, de serem substituídos por suas próprias criações. Frankenstein (1818), deMary Shelley, muitas vezes considerado o primeiro romance de ficção científica, se tornou sinônimo deste tema. Quando a peça de Čapek RUR (1921) introduziu o conceito de uma linha de montagem que utilizava robôs para tentar construir mais robôs, o tema recebeu uma conotação econômica e filosófica, posteriormente propagada pelo filme clássico de Fritz Lang Metropolis(1927). Porém, na década de 1940, o engenheiro químico Isaac Asimov começou a escrever diversas obras sobre robôs domésticos educados e fieis ao ser humano, onde grande parte do temor do domínio das máquinas (mecânicas) foi afastado parcialmente. Mas, os populares Blade Runner(1982) e The Terminator (1984) são ícones deste temor. No século XXI, com os robôs se tornando mais reais e perspectiva do surgimento de robôs inteligentes, uma melhor compreensão das interações entre os robôs e o homens é abordada em filmes modernos como A.I. (2001) de Spielberg e Eu, Robô(2004) de Proyas. (1)
Muitos consideram o primeiro robô, segundo as definições modernas, como sendo o barco teleoperado, similar a um ROV moderno, inventado por Nikola Tesla e demonstrado em uma exibição no ano de 1898 no Madison Square Garden. Baseado em sua patente 613 809 para o "teleautomation", Tesla desejava desenvolver o "torpedo sem fio" para se tornar um sistema de armas para a marinha estadunidense. (1)
Em 1924, surgiu o primeiro modelo de robô mecânico. Roy J. Wensley, engenheiro elétrico da Westinghouse, desenvolveu uma unidade de controle supervisionada. O dispositivo podia, utilizando o sistema de telefonia, ligar e desligar ou regular remotamente qualquer coisa que estivesse conectado a ele. Três anos depois, ele criou o Televox, um pequeno robô com aspecto humano que conseguia executar movimentos básicos, de acordo com os comandos de seu operador. Os robôs ganharam ainda mais popularidade com o 'nascimento' de Willie Vocalite, em 1930. Willie tinha o formato daqueles robôs que vemos nos filmes de ficção antigos. Tinha 2 metros de altura e era feito de aço e da mesma forma que o Televox podia ligar, desligar e regular dispositivos conectados a ele. A grande diferença estava no fato de fazer tudo isto sob comandos de voz - fumava, sentava, ficava de pé, movia os braços e conversava com as pessoas reproduzindo frases gravadas em discos de 78 rotações. Foi a grande sensação da exposição Mundial de Chicago em 1933. (3)
O primeiro robô autônomo eletrônico foi criado por Grey Walter na Universidade de Bristol, na Inglaterra, no ano de 1948. (1)
Participantes do trabalho do 3ºtrimestre
O trabalho do terceiro trimestre é a construção do robô gladiador. Os componentes do grupo para esse trabalho são:
Julia Hardman - nº15;
Luiza Linhares - nº23;
Maria Julia de Carvalho - nº30;
Maria Rita - nº31;
Milena - nº33;
quinta-feira, 23 de junho de 2016
Conclusão do projeto telefone de latinha
O grupo conseguiu concluir todos os objetivos, participou de todas as competições, e apesar de alguns imprevisto e problemas, como conseguir encaixar quem falava e quem ouvia, o grupo sempre junto buscava por soluções e por fim resolvia os problemas. Cada um fez fielmente sua parte no trabalho, o isolante acústico que foi a inovação tecnológica do grupou, ajudou bastante no desempenho do grupo, que apesar de não ter ficado entre os 5 melhores, teve uma pontuação relativamente boa. O projeto além de unir o grupo, é muito interessante e ainda muito divertido.
Telefone de Latinha: 5 grandezas físicas presentes no trabalho
- Força - Tração
- Peso
- Velocidade de propagação da onda
- Acústica - altura alta, pois a frequência da voz feminina é alta; Intensidade; Timbre
- Comprimento da onda
- Amplitude da onda
segunda-feira, 20 de junho de 2016



Telefone de latinha: comprimento de onda da voz feminina

Calculando o comprimento de onda da voz feminina (λ):
λ= _v_
f
Em que:
λ: é o comprimento da onda
v: velocidade de propagação da onda no meio. No exemplo o meio é o ar, e a velocidade é igual a 340m/s.
f: frequência da voz. No exemplo, a frequência é da voz feminina que segundo o site é igual a 200Hz.
Calculando:
λ= _340_ = 1,7 metros
200
λ= _v_
f
Em que:
λ: é o comprimento da onda
v: velocidade de propagação da onda no meio. No exemplo o meio é o ar, e a velocidade é igual a 340m/s.
f: frequência da voz. No exemplo, a frequência é da voz feminina que segundo o site é igual a 200Hz.
Calculando:
λ= _340_ = 1,7 metros
200
domingo, 19 de junho de 2016
Ponte de Tacoma



A Ponte de Tacoma Narrows (em inglês Tacoma Narrows Bridge) foi uma ponte pensil localizada sobre o Estreito de Tacoma Washington , Estados Unidos e que caiu
História:
Em 7 de novembro de 1940, caiu a ponte pensil de 1600 metros (Tacoma Narrows), apenas poucos meses após a sua inauguração.
De madrugada, os ventos atingiram os 70km/h, fazendo a estrutura oscilar muito, deslizando a alta velocidade. A polícia fechou então a ponte ao tráfego. Às 9h30 a ponte oscila em 8 ou 9 segmentos com amplitude de 0,9m e frequência de 36 ciclos por minuto. Às 10h00 dá-se um afrouxamento da ligação do cabo de suspensão norte ao tabuleiro, o que faz a ponte entrar num modo de vibração torcional a 14 ciclos por minuto. O eixo da via, os dois pilares e o meio da ponte são nodos. A partir daí a situação não se alterou muito durante cerca de uma hora, até que às 11h00 se desprende um primeiro pedaço de pavimento e às 11h10 a ponte entra em colapso, caindo no rio.
Os grandes defeitos da ponte foram a sua enorme falta de rigidez transversal e torcional, pois estava ausente o reticulado por baixo do tabuleiro, e a frente aerodinâmica do perfil. Não houve vítimas deste acidente.
Uma nova ponte foi construída no local, e ainda se encontra em funcionamento.
Referência:
Wikipédia, a enciclopédia livre - Ponte de Tacoma Narrows
História:
Em 7 de novembro de 1940, caiu a ponte pensil de 1600 metros (Tacoma Narrows), apenas poucos meses após a sua inauguração.
De madrugada, os ventos atingiram os 70km/h, fazendo a estrutura oscilar muito, deslizando a alta velocidade. A polícia fechou então a ponte ao tráfego. Às 9h30 a ponte oscila em 8 ou 9 segmentos com amplitude de 0,9m e frequência de 36 ciclos por minuto. Às 10h00 dá-se um afrouxamento da ligação do cabo de suspensão norte ao tabuleiro, o que faz a ponte entrar num modo de vibração torcional a 14 ciclos por minuto. O eixo da via, os dois pilares e o meio da ponte são nodos. A partir daí a situação não se alterou muito durante cerca de uma hora, até que às 11h00 se desprende um primeiro pedaço de pavimento e às 11h10 a ponte entra em colapso, caindo no rio.
Os grandes defeitos da ponte foram a sua enorme falta de rigidez transversal e torcional, pois estava ausente o reticulado por baixo do tabuleiro, e a frente aerodinâmica do perfil. Não houve vítimas deste acidente.
Uma nova ponte foi construída no local, e ainda se encontra em funcionamento.
Referência:
Wikipédia, a enciclopédia livre - Ponte de Tacoma Narrows
quinta-feira, 16 de junho de 2016
Telefone de latinha:cálculo da força
Foi proposto ao grupo que fizesse o cálculo aproximado da força feita para deixar o fio totalmente esticado, para que, não ocorra interferência e o conseguir fazer com que o som se propague com qualidade.
Observação: Não utilizamos instrumentos de medida promocional. O cálculo é feito segundo os objetos, cujo peso, o grupo julgou parecer com a força feita na latinha
Lata de toddy quase cheia de aproximadamente 410g = 0,41kg
P= m.g
P=0,41×10= 4,1N
5 bananas nanicas de aproximadamente 110g cada:
110×5 550g = 0,55kg
P= m.g
P= 0,55x10= 5,5N
●Considerando a aceleração da gravidade 10m/s²
Conclusão:
●Acreditamos que a força feita na latinha é de no máximo 5,5N; se aproximando mais do peso da lata de toddy que é de 4,1N.
Referência do peso da banana:
http://www.emagrecerdicas.com.br/tabela-de-calorias/frutas/
Observação: Não utilizamos instrumentos de medida promocional. O cálculo é feito segundo os objetos, cujo peso, o grupo julgou parecer com a força feita na latinha
Lata de toddy quase cheia de aproximadamente 410g = 0,41kg
P= m.g
P=0,41×10= 4,1N
5 bananas nanicas de aproximadamente 110g cada:
110×5 550g = 0,55kg
P= m.g
P= 0,55x10= 5,5N
●Considerando a aceleração da gravidade 10m/s²
Conclusão:
●Acreditamos que a força feita na latinha é de no máximo 5,5N; se aproximando mais do peso da lata de toddy que é de 4,1N.
Referência do peso da banana:
http://www.emagrecerdicas.com.br/tabela-de-calorias/frutas/


{kind=link}



Resultado final da competição do telefone e latinha
Após todos os testes realizados em sala a competição terminou assim:
Grupo 3: 212 palavras
Grupo 9: 200 palavras
Grupo 6: 159 palavras
Grupo 8: 144 palavras
Grupo 4: 138 palavras
Grupo 1: 127 palavras
Grupo 2: 109 palavras
Observação: Na ultima competição realizada no Idesa, a Julia Hardman precicou ir embora antes do teste porque não estava se sentindo bem e ela era a pessoa responsável pelo lado que escuta do telefone, enquanto, a Maria Julia falaria do outro lado. Diante disso, o nosso resultado no ultimo teste acabou sendo pior do que os outros, e consequentemente o placar geral também.
Grupo 3: 212 palavras
Grupo 9: 200 palavras
Grupo 6: 159 palavras
Grupo 8: 144 palavras
Grupo 4: 138 palavras
Grupo 1: 127 palavras
Grupo 2: 109 palavras
Observação: Na ultima competição realizada no Idesa, a Julia Hardman precicou ir embora antes do teste porque não estava se sentindo bem e ela era a pessoa responsável pelo lado que escuta do telefone, enquanto, a Maria Julia falaria do outro lado. Diante disso, o nosso resultado no ultimo teste acabou sendo pior do que os outros, e consequentemente o placar geral também.
quarta-feira, 8 de junho de 2016
Telefone de Latinha: Placar final da competição
O placar da ultima competição ainda não foi divulgado no blog porque na ultima aula de terça-feira ocorreu a prova e não foi conversado sobre a competição desde a ultima aula.
sábado, 4 de junho de 2016
Competição com telefone de latinha
Na sexta-feira dia 03/06 foi realizada no salão de teatro do colégio Idesa mais uma etapa do projeto. A competição teve 9 rodadas, em cada uma o professor entregou pequenos pedaços de papel com frases, iguais para todos os grupos, e algumas delas com nomes bem complicados de serem passados.
O placar dos grupos será divulgado aqui até terça-feira.
O placar dos grupos será divulgado aqui até terça-feira.
segunda-feira, 30 de maio de 2016
Marte vai parecer maior hoje; planeta estará a menor distância em 11 anos
Nesta segunda (30), Terra e Marte estarão na posição mais próxima já registrada nos últimos 11 anos. A menor distância registrada no século entre o "planeta vermelho" e o nosso foi em agosto de 2003. Hoje, Marte ficará mais iluminado e poderá ser visto facilmente a olho nu.
A distância entre os dois planetas será de 75,3 milhões de quilômetros nesta noite. O número pode parecer alto, mas essa distância pode chegar até 400 milhões de quilômetros. Em 2003, foi registrada a menor distância em 60 mil anos --quando a marca foi de 55,76 milhões de quilômetros.
O fenômeno acontece quando a Terra forma um alinhamento quase perfeito com o Sol e Marte, num fenômeno chamado de oposição afélica. "Por estar mais distante do Sol, a órbita de Marte é maior que a da Terra. O tempo que Marte gasta para dar uma volta em torno da estrela é de aproximadamente dois anos terrestres", afirma Renato Las Casas, coordenador do grupo de astronomia da UFMG (Universidade Federal de Minas Gerais).
Esse alinhamento acontece a cada 26 meses, mas como as circunferências da Terra e de Marte não são perfeitas, a distância entre os dois planetas no momento do alinhamento nem sempre é a mesma.
O fenômeno irá acontecer novamente em julho de 2018 com uma aproximação ainda menor que a deste ano: 57, 6 milhões de quilômetros.
Referencia:
domingo, 22 de maio de 2016
Testes realizados com o segundo telefone de latinha
Foram realizados no colégio Idesa, na sexta feira, dia 20 de maio, os testes com o segundo telefone de latinha. O grupo usou o telefone que possui uma inovação, foi colocado EVA na parte em que escuta do telefone. O grupo ficou em terceiro lugar nessa competição de sala e o placar geral ficou assim:
1ºlugar: grupo 3 - 31 pontos
2ºlugar: grupo 6 - 23 pontos
3ºlugar: grupo 2 - 22 pontos
4ºlugar: grupo 1 - 18 pontos
5ºlugar: grupo 4 - 18 pontos
6ºlugar: grupo 8 - 17 pontos
7ºlugar: grupo 9 - 12 pontos
8ºlugar: grupo 5 - 9 pontos
9ºlugar: grupo 10 - 0 pontos
1ºlugar: grupo 3 - 31 pontos
2ºlugar: grupo 6 - 23 pontos
3ºlugar: grupo 2 - 22 pontos
4ºlugar: grupo 1 - 18 pontos
5ºlugar: grupo 4 - 18 pontos
6ºlugar: grupo 8 - 17 pontos
7ºlugar: grupo 9 - 12 pontos
8ºlugar: grupo 5 - 9 pontos
9ºlugar: grupo 10 - 0 pontos
quarta-feira, 18 de maio de 2016
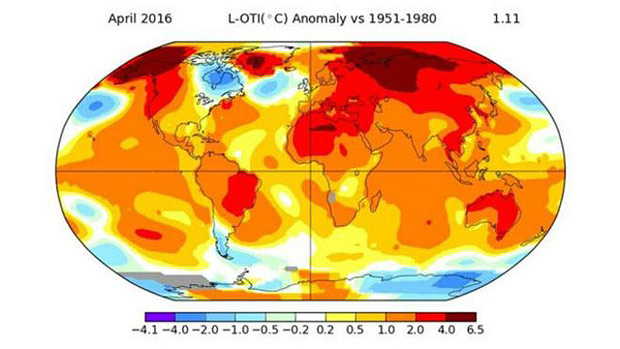
Temperatura do planeta aumenta
O mês de abril foi o sétimo seguido a bater recordes de temperatura global, segundo um mapa da Nasa, a agência espacial americana.
Os dados mostram que o mês passado quebrou o recorde para abril pela maior margem já registrada - foi o terceiro mês consecutivo em que esse recorde foi quebrado.
Usando a temperatura média analisada pela Nasa no período entre 1951 e 1980, abril de 2016 teve uma temperatura igual a de janeiro.
Fevereiro e março registraram temperaturas mais altas que a média desse período, enquanto abril destroçou o recorde anterior, estabelecido em 2010, por 0,24º Celsius.
"A circunstância lamentável que temos agora é a soma de um intenso fenômeno El Niño que foi potencializado pelo aquecimento global", disse Christina Figueres, secretária-executiva da Convenção da ONU para Mudanças Climáticas.
"Todas essas quebras de recordes nas temperaturas e as implicações disso - como o recorde no número de incêndios e as secas na Índia - nos fazem lembrar que não podemos fazer nada a não ser acelerar planos com soluções. Não temos outra opção a não ser acelerar essa agenda", afirmou.
Várias regiões do hemisfério Norte, incluindo o Estado americano do Alasca, registraram temperaturas muito altas em abril - um padrão que se repetiu em meses anteriores.
Os dados mostram que o mês passado quebrou o recorde para abril pela maior margem já registrada - foi o terceiro mês consecutivo em que esse recorde foi quebrado.
Usando a temperatura média analisada pela Nasa no período entre 1951 e 1980, abril de 2016 teve uma temperatura igual a de janeiro.
Fevereiro e março registraram temperaturas mais altas que a média desse período, enquanto abril destroçou o recorde anterior, estabelecido em 2010, por 0,24º Celsius.
"A circunstância lamentável que temos agora é a soma de um intenso fenômeno El Niño que foi potencializado pelo aquecimento global", disse Christina Figueres, secretária-executiva da Convenção da ONU para Mudanças Climáticas.
"Todas essas quebras de recordes nas temperaturas e as implicações disso - como o recorde no número de incêndios e as secas na Índia - nos fazem lembrar que não podemos fazer nada a não ser acelerar planos com soluções. Não temos outra opção a não ser acelerar essa agenda", afirmou.
Várias regiões do hemisfério Norte, incluindo o Estado americano do Alasca, registraram temperaturas muito altas em abril - um padrão que se repetiu em meses anteriores.
Referencia:
Fósseis chineses revelam detalhes de réptil pré-histórico "bizarro"

Uma criatura do tamanho de um crocodilo que viveu há 242 milhões de anos é o mais antigo réptil marinho herbívoro já encontrado, de acordo com evidências reveladas pelo estudo de fósseis da espécie.
Duas ossadas encontradas na China permitiram conhecer detalhes do crânio do Atopodentatus e como ele se alimentava.
Cientistas dizem que o animal usava sua cabeça em forma de martelo para comer plantas submarinas. Só alguns répteis marinhos, vivos ou extintos, são herbívoros.
O cientista Nick Fraser, do Museu Nacional da Escócia, trabalhou nos fósseis e disse que eles parecem ter saído de um livro infantil, porque o réptil em questão é um "animal muito, muito bizarro", diz ele.
"Acreditamos que ele raspava algas e coisas assim de rochas que estavam debaixo d'água. Répteis marinhos herbívoros são muitos raros - e esse é o mais antigo que conhecemos."
Dentes estranhos
Os primeiros fósseis da criatura foram descobertos há alguns anos. Ele foi chamado de Atopodentatus unicus, que significa "singularmente estranho e cheio de dentes" em latim.
Novos fósseis localizados na província chinesa de Yunnan pela cientista Chun Li, do Instituto de Paleontologia e Paleantropologia de Vertebrados, em Pequim, permitiram conhecer de forma inédita o crânio do animal.
A descoberta publicada no periódico científico Science Advances mostra que, em vez de ter um focinho comprido como se pensava, esse réptil tinha uma mandíbula em formato de martelo com dentes por todas as bordas.
Fraser diz que o Atopodentatus ajuda compreender melhor o período em que houve uma extinção em massa no planeta, há 252 milhões de anos, já que ele viveu em uma época em que a Terra estava se recuperando da perda de 90% dos animais marinhos.
Referencia:
sexta-feira, 13 de maio de 2016
Telefone de latinha: Testes e inovação tecnológica
Testes realizados no dia 13/05



 Todos os testes tiveram bons resultados, os telefones funcionam super bem.
Todos os testes tiveram bons resultados, os telefones funcionam super bem.
*Como inovação tecnológica usamos EVA para isolamento acústico, que aumentou a eficiência do projeto.



*Como inovação tecnológica usamos EVA para isolamento acústico, que aumentou a eficiência do projeto.
Assinar:
Comentários (Atom)